AURA (Autonomous Resilience Agent) is an AI framework I developed to help operators manage underwater vehicles when things go wrong. Using Human-in-the-Loop Distillation, it translates noisy sensor data into clear anomaly hypotheses, works with the operator to diagnose root causes, and retains that expertise so the system keeps getting smarter. This creates an adaptive, explainable partner for resilient human-robot teams in safety-critical marine missions. Accepted to IROS 2026, AURA is part of my broader research direction: building AI that does not merely classify sensor readings, but reasons about them and explains its conclusions.
UROSA (Underwater Robot Self-Organizing Autonomy) is a new software architecture I created to rethink how underwater robots make decisions. Instead of hard-coding every behavior, UROSA uses a team of specialized AI agents that share information, negotiate plans, and adapt collectively as the mission evolves. This is a deliberate move away from brittle, rule-based autonomy toward genuinely cognitive underwater systems that can handle the unexpected without waiting for a human to micromanage them. It combines distributed AI, multi-agent coordination, and robust control into an architecture designed for the unpredictability of the ocean.

This postdoctoral research targets one of the hardest automation problems in the energy sector: maintaining offshore wind farms without sending people to sea. I developed a multi-agent robotic framework that coordinates an Autonomous Underwater Vehicle (AUV), an Autonomous Surface Vehicle (ASV), and a robotic manipulator into a single, cooperative inspection and maintenance system.
The work combines advanced software architectures, autonomous control, and marine dynamics to keep robots operating reliably in harsh offshore conditions. Core technical contributions include dynamic disturbance rejection, tightly coordinated multi-agent control, and real-time decision-making under uncertainty. Beyond the algorithms, the project evaluates the real-world feasibility of uncrewed wind farm maintenance, with the potential to cut operational costs, reduce human risk, and lower the carbon footprint of crewed service vessels.

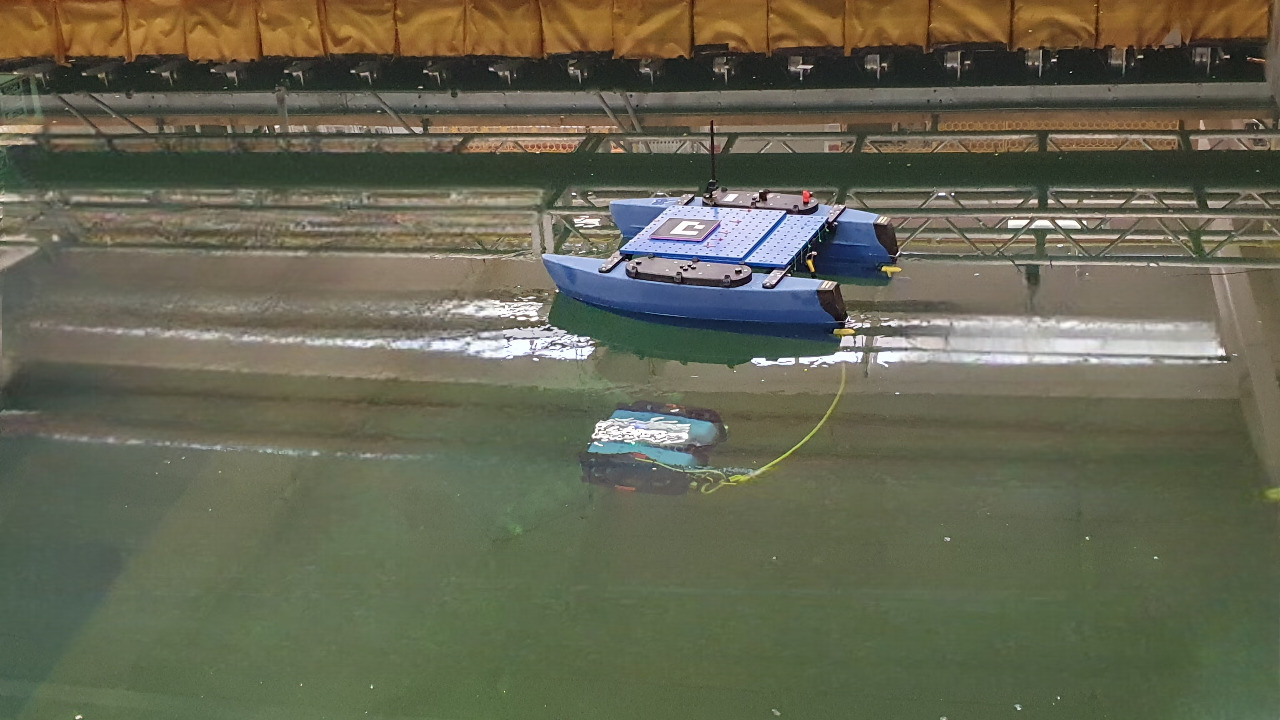
Operating a tethered underwater robot from a surface vehicle is deceptively difficult: every wave and current acting on the ASV is transmitted straight to the AUV through the cable. This work introduces a novel motion-control framework that explicitly models and compensates for these coupled disturbances, enabling an Autonomous Underwater Vehicle (AUV) and Autonomous Surface Vehicle (ASV) to operate as a single coordinated system in real marine conditions.
The approach bridges nonlinear marine dynamics, multi-robot coordination, and robust control to keep the tethered team stable and purposeful despite waves, wind, and currents. It is a direct contribution to making tethered marine robotics dependable enough for field operations.
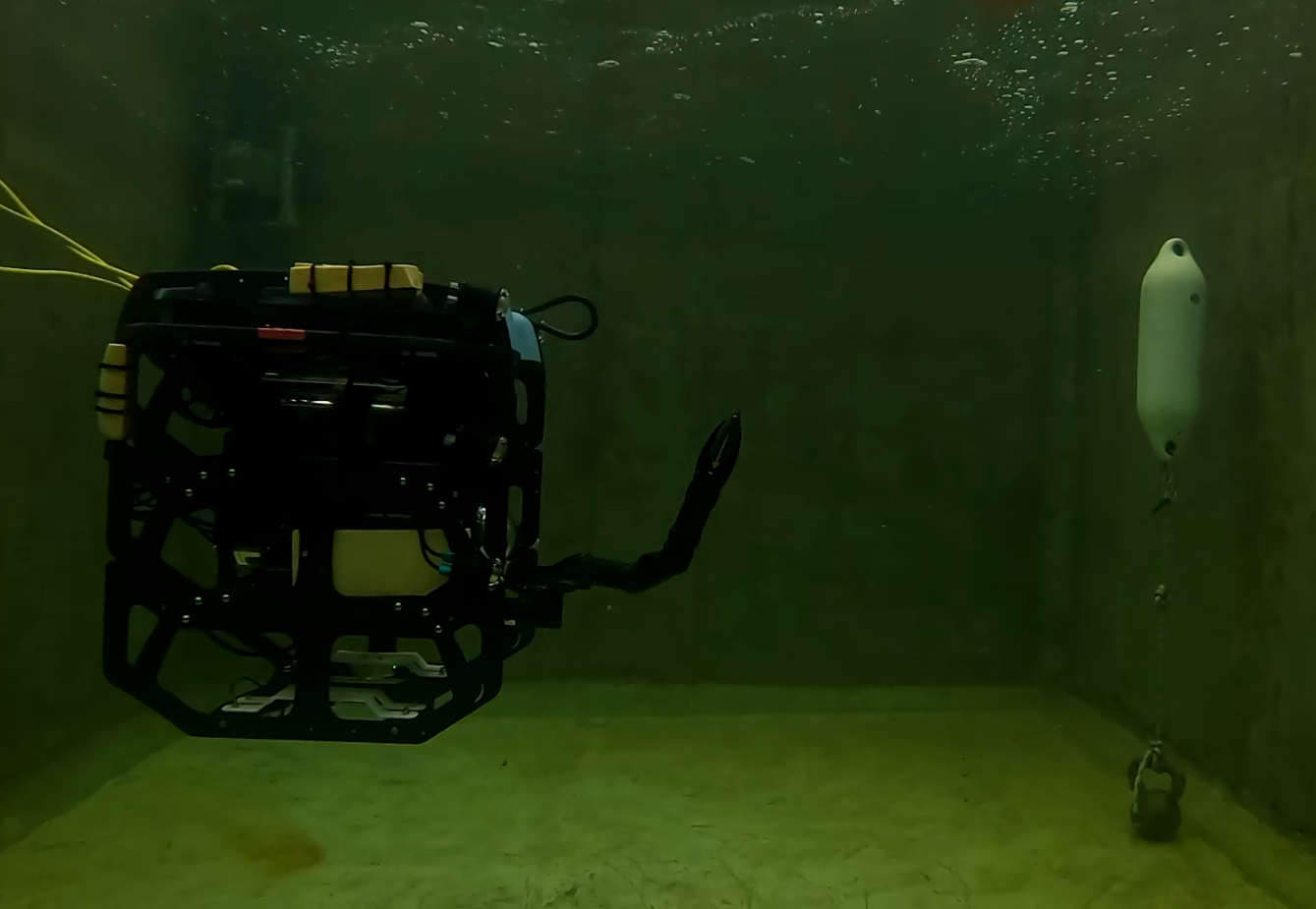
This research focuses on underwater manipulation, combining context-aware behavior learning with heuristic motion memory. The goal is to push precision and efficiency in real subsea operations by developing motion planners that recover gracefully when sensors fail and compute fast enough to run onboard. Accepted to IROS 2025, this work advances trajectory and full-body motion optimization for underwater vehicle-manipulator systems operating in harsh, partially observable environments.
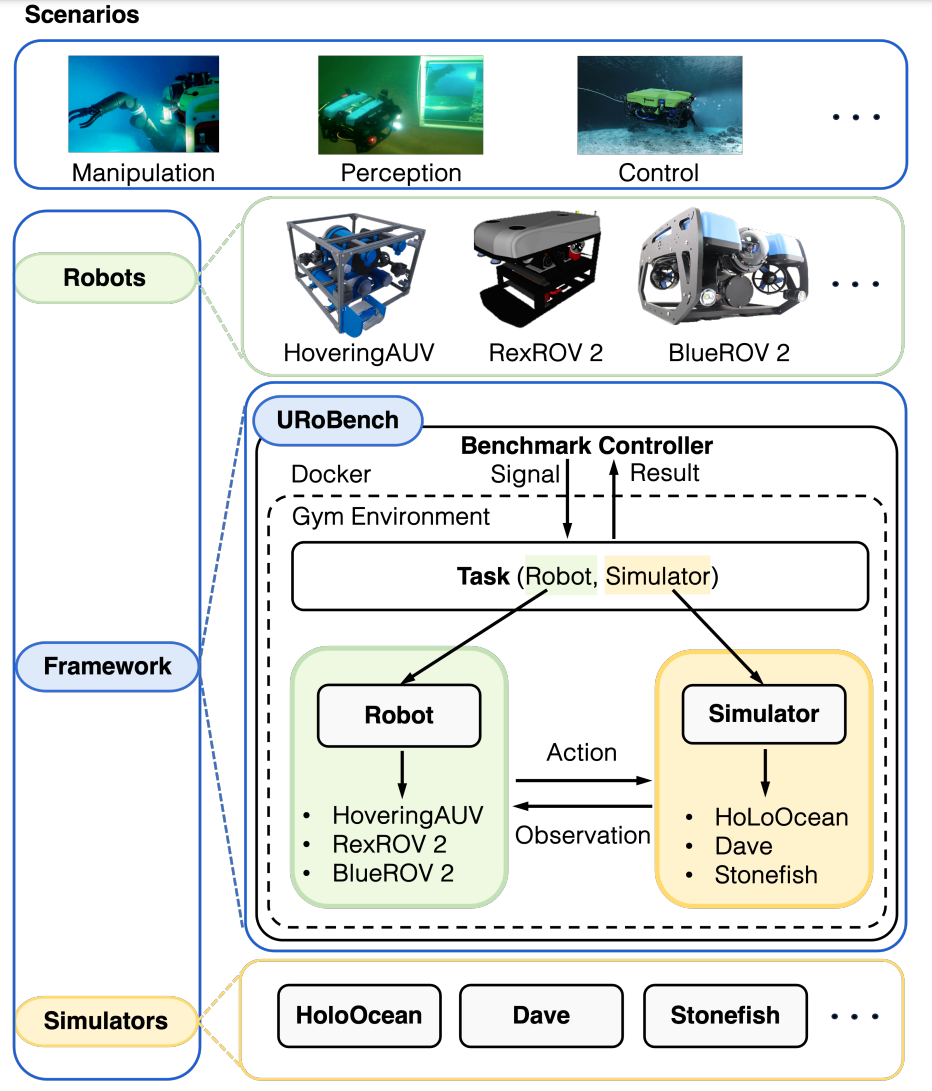
This paper introduces URoBench, a modular benchmarking framework to standardize the evaluation of Reinforcement Learning (RL) algorithms across underwater robotics simulators. By rigorously testing HoloOcean, Dave, and Stonefish under identical RL conditions, it demonstrates that fair, comparable, and reproducible evaluation is possible in marine robotics—something the community needs to move learning-based methods from simulation to sea trials.