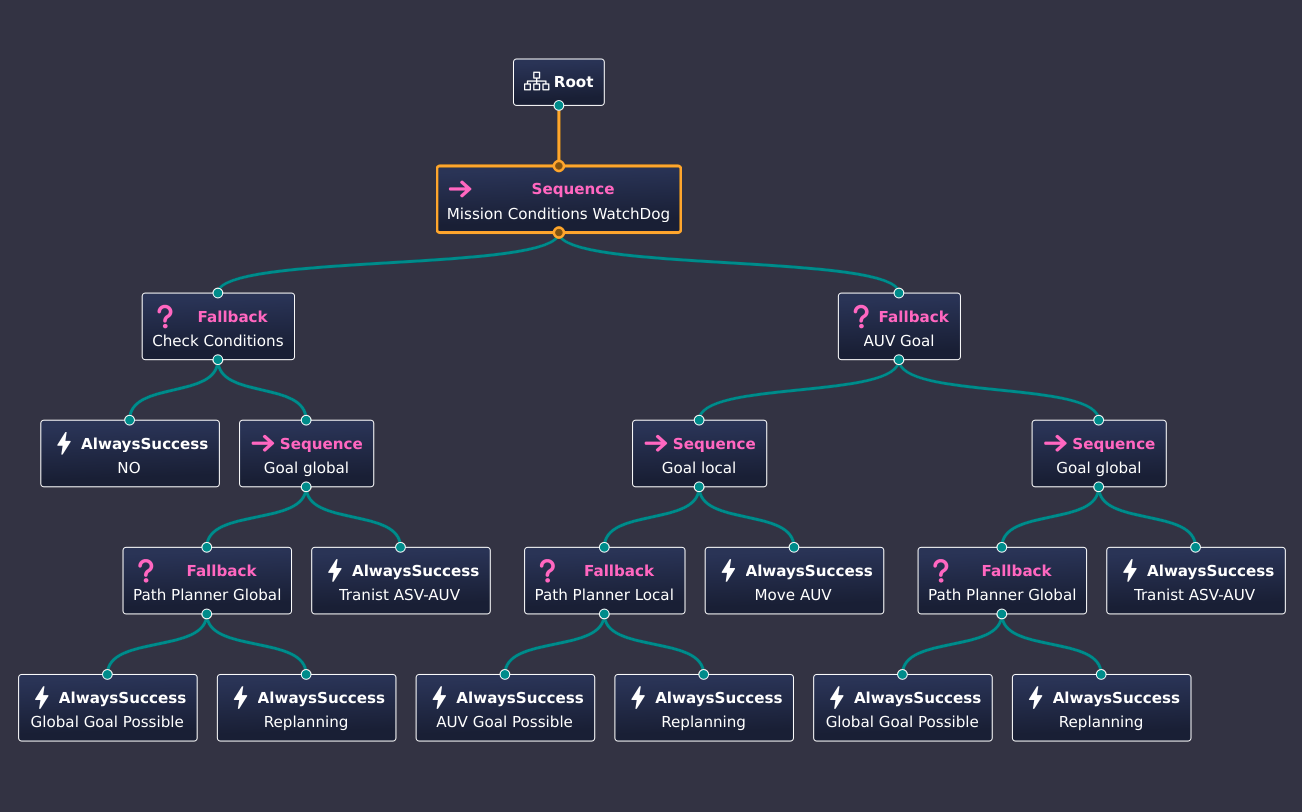
This BSc thesis project explored how Large Language Models can generate behavior trees for autonomous underwater missions. The student built a pipeline where the LLM translates high-level human intent into executable robot behaviors, validates feasibility against the vehicle's capabilities, and deploys the resulting tree first in the StoneFish simulator and then on real hardware. The work sits at the cutting edge of LLM-driven robot task planning for marine robotics.
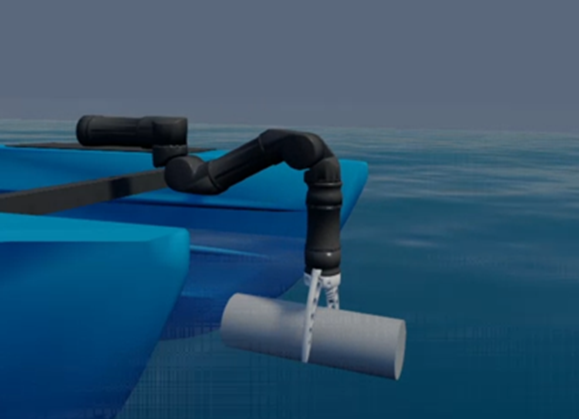
This MSc thesis developed an end-to-end waste-collection pipeline for maritime environments. A robotic arm mounted on the BlueBoat ASV detects floating debris through a vision system, navigates toward it, and performs precise pick-up maneuvers. The project integrates perception, motion planning, and low-level control into a coherent autonomous system, demonstrating how marine robots can be applied to environmental monitoring and cleanup.
Behavior trees are one of the most practical ways to structure complex robot decision-making. In this course, I teach the fundamentals of behavior-tree design, show how to implement them in real ROS 2 systems, and walk through patterns that scale from simple demos to production-grade autonomy stacks.

Reinforcement learning is reshaping how robots learn skills, but moving from theory to a working ROS robot is hard. This course bridges that gap: I cover core RL concepts and guide students through hands-on coding exercises and simulations inside ROS, so they can train, evaluate, and deploy learning-based behaviors on real robot platforms.

This course introduces machine learning and AI concepts directly through robotics problems. Students learn how robots perceive, decide, and act autonomously, using Python to implement algorithms that make robots smarter, more adaptive, and better collaborators with humans. It is designed for learners who want to understand intelligence from the perspective of embodied systems.

An industrial training session I delivered to Yaskawa software and application engineers, introducing the ROS 2 ecosystem and how it integrates with modern manipulators. The presentation translates academic robotics middleware into practical concepts for production robot development.
A lecture I gave for the Robotics Systems Science course at Heriot-Watt University, covering ROS 2 fundamentals and motion-planning methods for real robotic applications. The material connects classroom theory with the software stacks used in current research and industry.
A Heriot-Watt University lecture I prepared on marine robotics, using the BlueRobotics ecosystem as a concrete example. It covers the concepts, sensors, vehicles, and open-source software stacks that underpin modern autonomous surface and underwater systems, giving students a practical entry point into a complex field.